06.09.19
Специалисты выяснили, как с помощью нейросетей создавать трехмерные карты пространства, в которых находятся роботы. Это поможет им избегать столкновений и осуществлять автономную навигацию. Работа проходила в рамках проекта, поддерживаемого Российским научным фондом, а ее результаты представлены на конференции European Conference on Mobile Robotics.
«В этой работе мы создали такую нейросеть, которая, с одной стороны, качественно определяет расстояние до объектов в пространстве, а, с другой, быстро работает на маломощных компьютерах, таких как Nvidia Jetson, – рассказывает один из авторов исследования Константин Яковлев, кандидат физико-математических наук, сотрудник Института проблем искусственного интеллекта ФИЦ ИУ РАН.
Для решения задачи определения расстояния в последнее время активно используются нейронные сети, которые, «учатся» предсказывать расстояние по изображению и, в целом, неплохо справляется с этой задачей. Проблема заключается в том, что такие нейросети обычно требуют для своей работы мощного железа, которое не всегда можно установить на мобильного робота. Именно эту проблему и решали сотрудники ФИЦ «Информатика и управление» РАН.
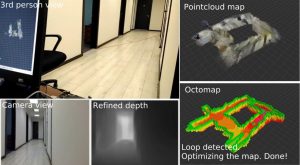
Они создали нейросеть, которая имеет архитектуру энкодер-декодер. Энкодер – это часть нейросети, которая извлекает из цветного изображения некоторые «признаки», и самостоятельно строит описание изображения. Декодер из этих признаков извлекает информацию о расстояниях до объектов – карту глубины.
«Наше новшество состоит в том, что мы методом проб и ошибок существенно упростили структуру декодера, а также внесли улучшения в процесс обучения – изменили структуру функции потерь. За счет этого сеть работает быстро и при этом достаточно хорошо определяет расстояния до объектов», – поясняет Константин Яковлев.
Полученная таким образом карта глубины используется в дальнейшем для построения общей 3D карты окружающего пространства.
https://youtu.be/ayjvfzm-C7s
Андрей Горбачев

Нет комментариев